
American popular culture may sometimes take a dim view of robots, but we’ve seen stories of robots being useful during emergency situations like Africa’s most recent Ebola outbreak and the deadly and massive earthquakes that slammed Nepal back in April. Still, even though we cover robotics with some frequency we were recently amazed to learn about the robot technology of Boston Dynamics, which is now a Google (or Alphabet) company.
The robotics and engineering firm Boston Dynamics is headquartered in Waltham, MA, and wholly owned as a subsidiary by Google Inc. (NASDAQ:GOOG), both of which are soon to enter into a new corporate structure under Alphabet Inc. Founded in 1992 by Marc Raibert as a startup spinning off from technology developed at the Massachusetts Institute of Technology, the company has worked to create robotic units which have the mobility and maneuverability of animals.
To judge by some of the videos posted by Boston Dynamics online, they’re doing an incredibly fantastic job in the short time since Google’s December 2013 acquisition of the company. The company’s official YouTube channel has seen some very intriguing uploads over the past few years. For example, Sand Flea Jumping Robot (see below), uploaded in March 2012, shows a remote-controlled box on wheels that weighs 11 pounds and yet has the capability to jump 30 feet in the air. The bot is guided towards a target during flight by an onboard stabilization system.
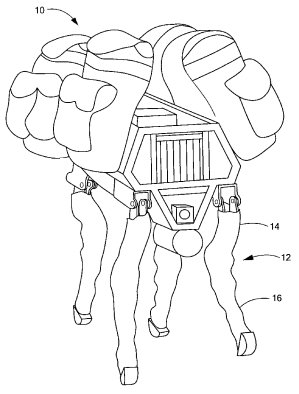
Introducing Spot (see below) features Spot, a 160-pound four-legged robot that can take a sizable kick to its side and regain its footing on its own. In one sequence, Spot travels down a hallway and is knocked off course. Without stopping or losing much stability, Spot sidles back to its original forward path. Outdoors, Spot can handle some fairly tough terrain and it travels uphill with seeming ease.
Another video from 2012 (see below) shows the Cheetah Robot tackling a treadmill chugging along at speeds of 28 miles per hour, faster than Guinness World Record land speed record holder Usain Bolt. In October 2013, Boston Dynamics published “Introducing WildCat” which showcases what appears to be a larger version of Spot that can gallop along on flat terrain at speeds of up to 16 miles per hour. Other compnay projects include Atlas, a bipedal robot that can guide itself stably over uneven ground, even if it does still require a tether cable to supply power.
Private capital from Google has almost assuredly helped Boston Dynamics increase its output but the company has been lucky enough to have secured funding from some public entities. For instance, development of the Sand Flea has been buoyed by financial support from the U.S. Army’s Rapid Equipping Force, the Defense Advanced Research Projects Agency (DARPA) as well as the counter-IED program Joint Improvised Explosive Device Defeat Organization (JIEDDO), now the Joint Improvised-Threat Agency (JIDA). DARPA has also contributed funding for the WildCat unit through the organization’s Maximum Mobility and Manipulation program. Other organizations which have partnered with Boston Dynamics in the past include the U.S. Navy, Marine Corps and Sony Corporation (NYSE:SNE).
As fun as it may be to sit and watch these advanced robots, we now turn to take a look at the patent portfolio being developed by Boston Dynamics.
Boston Dynamics’ Issued Patents: Robots That Jump or Travel Under the Sea
 The patent portfolio of Boston Dynamics is small but it does cover some very intriguing innovations in the field. The company holds six patents issued by the U.S. Patent and Trademark Office, two of which protect jumping technologies that may contribute to some functioning of the Sand Flea. U.S. Patent No. 8849451, issued under the title Hopping Robot, protects a robot with a chassis, a motive subsystem that maneuvers the chassis, a hopping actuator including a rearwardly extending foot which is attached to the chassis for launching a robot and a separate leg pivotable to pitch the chassis upward at a selected launch trajectory angle. This technology, developed to overcome issues in robotic components suffering damage when the unit lands, is definitely on display in the Sand Flea video, and diagrams attached to the patent grant confirm this. Another robotic jumping technology is reflected within U.S. Patent No. 6484068, titled Robot Apparatus and Method for Controlling Jumping of Robot Device. This protects a robot apparatus having a leg part with a link mechanism connected to an elastic member which is mounted so that it holds a substantially linear relation between the driving means and the leg part’s distal end. This innovation provides more stability during jumping for four-legged robotic animals, especially those that might be kept as pets or for entertainment purposes. This patent, the earliest issued one in Boston Dynamics’ portfolio dating back to November 2002, is jointly issued to Sony, representing some of the previous partnership between these two companies.
The patent portfolio of Boston Dynamics is small but it does cover some very intriguing innovations in the field. The company holds six patents issued by the U.S. Patent and Trademark Office, two of which protect jumping technologies that may contribute to some functioning of the Sand Flea. U.S. Patent No. 8849451, issued under the title Hopping Robot, protects a robot with a chassis, a motive subsystem that maneuvers the chassis, a hopping actuator including a rearwardly extending foot which is attached to the chassis for launching a robot and a separate leg pivotable to pitch the chassis upward at a selected launch trajectory angle. This technology, developed to overcome issues in robotic components suffering damage when the unit lands, is definitely on display in the Sand Flea video, and diagrams attached to the patent grant confirm this. Another robotic jumping technology is reflected within U.S. Patent No. 6484068, titled Robot Apparatus and Method for Controlling Jumping of Robot Device. This protects a robot apparatus having a leg part with a link mechanism connected to an elastic member which is mounted so that it holds a substantially linear relation between the driving means and the leg part’s distal end. This innovation provides more stability during jumping for four-legged robotic animals, especially those that might be kept as pets or for entertainment purposes. This patent, the earliest issued one in Boston Dynamics’ portfolio dating back to November 2002, is jointly issued to Sony, representing some of the previous partnership between these two companies.
 Some of Boston Dynamics’ patented technologies are directed at improved systems for mechanized movements that address the shortcomings of conventional hydraulics in terms of speed and simplicity. U.S. Patent No. 8126592, issued under the title Actuator System, claims an actuator system for a linkage which includes a joint between two members, at least two actuator assemblies connected between those members and a hydraulic circuit that contains a sensor system for sensing a magnitude of a load on the assemblies and members, a fluid supply system for supplying fluid to the actuator assemblies and a control system responsive to the sensors for controlling the fluid supply system. This innovation was developed to provide an actuation system for four-legged robots that enables high power on demand while also enabling low power operations. A newly invented valve intended to replace the use of servo valves, which can be heavy and expensive, is detailed within U.S. Patent No. 8973613, which is titled Electrorheological Valve. The electrorheological (ER) fluid valve protected here is constructed of a housing with two substrates with independently controllable electrodes, two walls and multiple input and output ports, ER fluid that can flow in the housing and a controller that selectively establishes fields between the two substrates which define fluid passages when the ER fluid reacts with the fields. This new ER valve configuration seeks to improve the ability to control the rate of fluid traveling through an ER valve.
Some of Boston Dynamics’ patented technologies are directed at improved systems for mechanized movements that address the shortcomings of conventional hydraulics in terms of speed and simplicity. U.S. Patent No. 8126592, issued under the title Actuator System, claims an actuator system for a linkage which includes a joint between two members, at least two actuator assemblies connected between those members and a hydraulic circuit that contains a sensor system for sensing a magnitude of a load on the assemblies and members, a fluid supply system for supplying fluid to the actuator assemblies and a control system responsive to the sensors for controlling the fluid supply system. This innovation was developed to provide an actuation system for four-legged robots that enables high power on demand while also enabling low power operations. A newly invented valve intended to replace the use of servo valves, which can be heavy and expensive, is detailed within U.S. Patent No. 8973613, which is titled Electrorheological Valve. The electrorheological (ER) fluid valve protected here is constructed of a housing with two substrates with independently controllable electrodes, two walls and multiple input and output ports, ER fluid that can flow in the housing and a controller that selectively establishes fields between the two substrates which define fluid passages when the ER fluid reacts with the fields. This new ER valve configuration seeks to improve the ability to control the rate of fluid traveling through an ER valve.
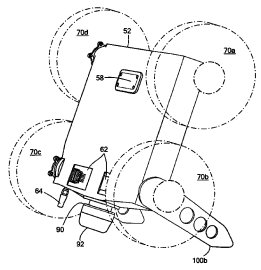
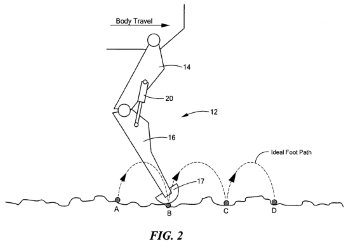
Robotic design features which are intended to improve their mobility in when travelling horizontally or on an incline are discussed within U.S. Patent No. 7734375, which is titled Robot and Robot Leg Mechanism. The robot leg mechanism disclosed here involves a leg, a hip connected to the leg to abduct and adduct a leg, a linkage configured to rotate the leg along a predetermined path and a shaft connected to the hip’s coupler gears and a rotatable frame portion. This robotic innovation utilizes a minimum of actuators and is also 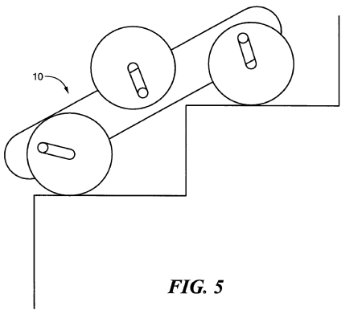 compact, lightweight and relatively inexpensive while still being able to climb inclines. Wheeled robots for tackling extremely difficult terrain are at the center of U.S. Patent No. 7398843, entitled Reconfigurable Robot Drive. The robot protected here is comprised of a robot body, a plurality of wheels connected to the robot body for propelling the robot and an axle for each wheel; the wheels are configured to connect centrally to the axle when traveling over flat terrain or to offset the axle’s position when traveling over rough terrain. This innovation enables the development of robots that can travel in underwater aquatic environments where they may need to travel over smooth and rough terrain.
compact, lightweight and relatively inexpensive while still being able to climb inclines. Wheeled robots for tackling extremely difficult terrain are at the center of U.S. Patent No. 7398843, entitled Reconfigurable Robot Drive. The robot protected here is comprised of a robot body, a plurality of wheels connected to the robot body for propelling the robot and an axle for each wheel; the wheels are configured to connect centrally to the axle when traveling over flat terrain or to offset the axle’s position when traveling over rough terrain. This innovation enables the development of robots that can travel in underwater aquatic environments where they may need to travel over smooth and rough terrain.
Patent Applications of Note: Orthotic Joint Braces and More Jumping Robotics
We did also note a handful of patent applications filed with the USPTO by Boston Dynamics, some of which we felt that readers might enjoy seeing more in-depth. The company has leveraged some of its robotics 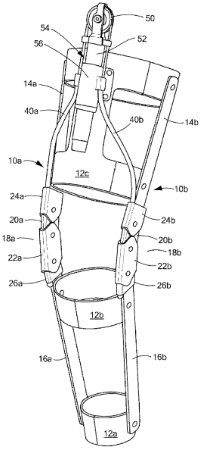 research and development for medical fields to judge by the technology outlined within U.S. Patent Application No. 20150051527, filed under the title Brace System. This would protect a brace system composed of a medial brace and a lateral brace securable via cross members, each brace having an upper portion, a lower portion and a hinge assembly between those two portions; the brace system also includes a force differential actuator subsystem connected to both the medial and lateral braces. The resulting invention is an orthotic knee brace that can aid in the treatment of those suffering from joint injuries.
research and development for medical fields to judge by the technology outlined within U.S. Patent Application No. 20150051527, filed under the title Brace System. This would protect a brace system composed of a medial brace and a lateral brace securable via cross members, each brace having an upper portion, a lower portion and a hinge assembly between those two portions; the brace system also includes a force differential actuator subsystem connected to both the medial and lateral braces. The resulting invention is an orthotic knee brace that can aid in the treatment of those suffering from joint injuries.
More improvements in ER valves were found within U.S. Patent Application No. 20140319390, which is titled Printed Circuit Board Electrorheological Fluid Valve. This patent application would protect a printed circuit board ER fluid valve that contains spaced, bonded, epoxy printed circuit board laminates defining flow channels, electrodes formed on the laminate opposite of the flow channels and surface pads on a laminate electrically connected to electrodes for supplying a voltage to control ER fluid flow through the channels. The resulting ER valve is more cheaply produced, integrates internal wiring and can hold high pressure fluids without leaking.
 Typical hydraulics have not been completely abjured by the research teams at Boston Dynamics, however. U.S. Patent Application No. 20120291873, which is titled Hydraulic Circuit, discloses a hydraulic circuit with a source of high pressure hydraulic fluid, a source of medium pressure hydraulic fluid, a return for low pressure hydraulic fluid, an actuator, a valve subsystem connecting the two sources, the return and the actuator for driving the actuator using the pressurized hydraulic fluids, as well as a controller for switching the valve subsystem between high and medium pressure fluids based on pressure criteria. The innovation allows for reduced power requirements in some walking robot applications, encouraging the use of smaller internal combustion engines while increasing a robot’s cargo space.
Typical hydraulics have not been completely abjured by the research teams at Boston Dynamics, however. U.S. Patent Application No. 20120291873, which is titled Hydraulic Circuit, discloses a hydraulic circuit with a source of high pressure hydraulic fluid, a source of medium pressure hydraulic fluid, a return for low pressure hydraulic fluid, an actuator, a valve subsystem connecting the two sources, the return and the actuator for driving the actuator using the pressurized hydraulic fluids, as well as a controller for switching the valve subsystem between high and medium pressure fluids based on pressure criteria. The innovation allows for reduced power requirements in some walking robot applications, encouraging the use of smaller internal combustion engines while increasing a robot’s cargo space.
More developments in jumping robotic assemblies can be seen on display within U.S. Patent Application No. 20140083077, titled Environmentally Sealed Combustion Powered Linear Actuator. The combustion powered linear actuator that would be protected here has an actuator body with a first chamber, a power piston mounted in the first chamber movable between retracted and extended positions and having its own combustion chamber, a first seal around the piston sealing the piston to the actuator body, a vent region that allows exhaust gases to bypass the first seal and vent out of the actuator body, a seal body for the distal end of the piston and a second seal proximate the distal end of the actuator body cooperating with the seal body to seal the vent region. This improved sealing system helps to prevent the contamination of actuator components in harsh environments, which can lead to malfunction.

![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2024/04/UnitedLex-May-2-2024-sidebar-700x500-1.jpg)
![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2024/04/Artificial-Intelligence-2024-REPLAY-sidebar-700x500-corrected.jpg)
![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2024/04/Patent-Litigation-Masters-2024-sidebar-700x500-1.jpg)

![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2021/12/WEBINAR-336-x-280-px.png)
![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2021/12/2021-Patent-Practice-on-Demand-recorded-Feb-2021-336-x-280.jpg)
![[Advertisement]](https://ipwatchdog.com/wp-content/uploads/2021/12/Ad-4-The-Invent-Patent-System™.png)






Join the Discussion
No comments yet.